
Frequently Asked Questions
Stepper motors rotate a given distance per electrical input pulse received. This "stepping" characteristic makes them an excellent choice for applications which require precise positioning.
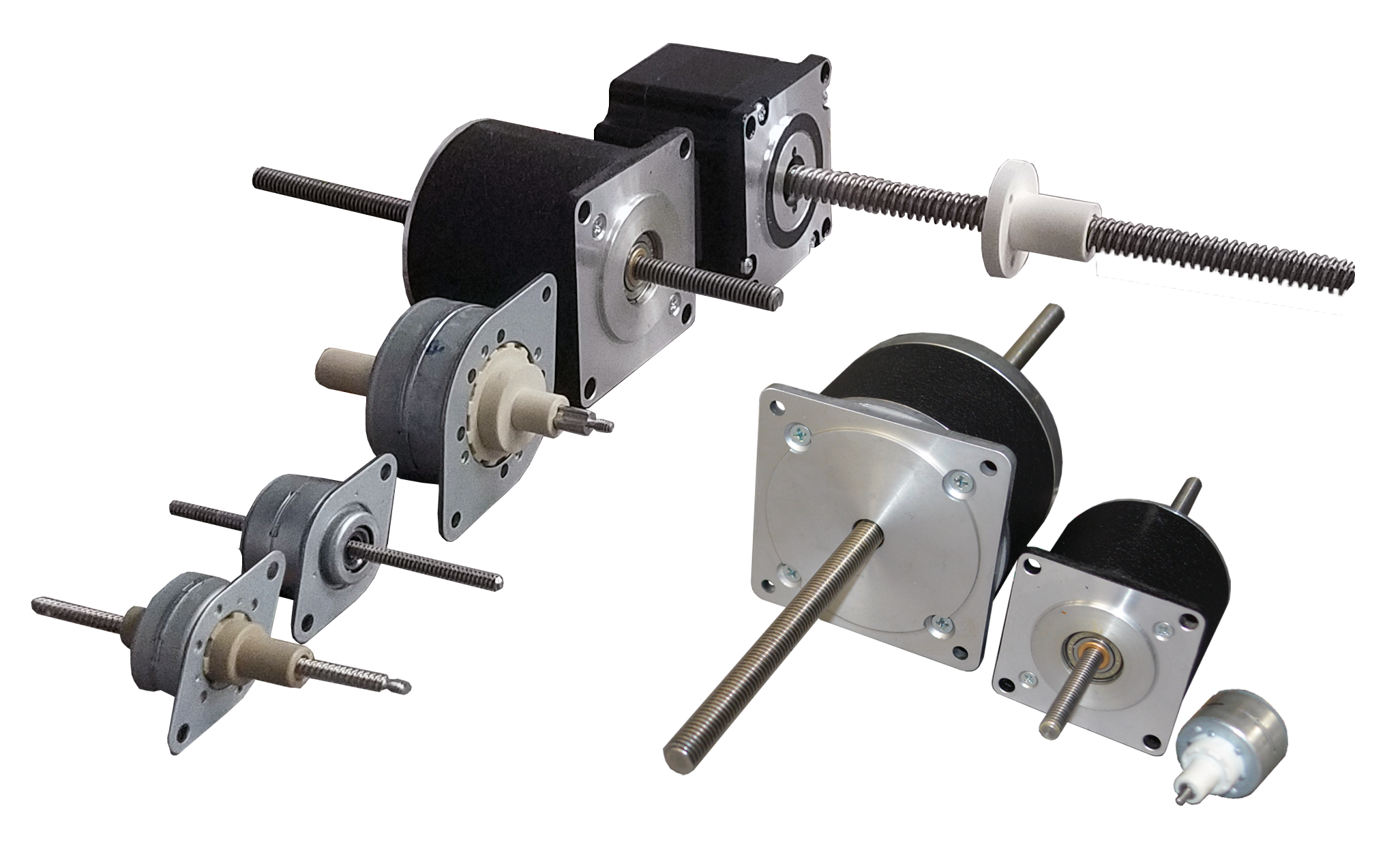
Stepper motor linear actuators, sometimes called "can-stack actuators," are devices which convert rotary motion from the stepper motor into linear motion. A stepper actuator uses a threaded nut and leadscrew in place of the motor shaft. For each pulse of electrical current, the stepper actuator will achieve a given amount of rotary motion. This makes these devices an excellent option for positioning applications.
Captive stepper motor linear actuators (a.k.a. "rotating screw stepper actuators") are typically used in applications requiring short stroke lengths. A captive actuator utilizes an anti-rotation mechanism and a splined output shaft, allowing it to extend and retract as a unit without additional anti-rotation requirements.
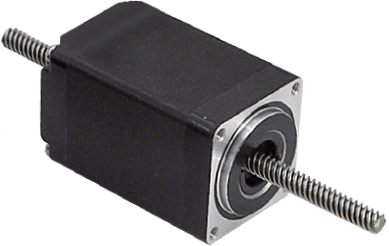
Non-captive stepper motor linear actuators (a.k.a. "rotating nut stepper actuators") include a leadscrew which passes through the motor and, theoretically, has no stroke limits. This makes them ideal for applications requiring longer strokes. Non-captive actuators must be mounted in the assembly in such a way that it will not rotate. Because of this, the lead screw can extend and retract without rotating.
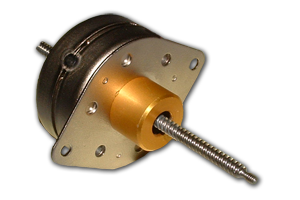
External linear stepper motor actuators (a.k.a. "traveling-nut stepper actuators") use a leadscrew and nut assembly which extends out from the motor in one direction. Rotary motion from the motor is converted into linear motion, allowing the nut to traverse back and forth along the lead screw as it turns.
Stepper motor linear actuators are ideal for applications which require some combination of precision positioning, high speeds, and a long running life. Some examples include automated medical equipment, X-Y and X-Y-Z tables, telecommunications equipment, and many more.
Running a stepper actuator to a hard stop may cause the unit to lock up, especially at higher speeds/forces. It is possible to do so under reduced input power, but it is not typically recommended.
This is possible, depending upon the lead screw pitch. Finely-threaded screws cannot be back-driven.
Stepper motors and actuators are designed to run in an open loop system and therefore do not typically require feedback. However, if the unit is being run in a closed-loop system or if exact positioning must be known, an encoder may be needed.
No, it may actually decrease accuracy. Torque/force will also be reduced. To improve system accuracy, consider the addition of an encoder.
A 4-lead motor has 2 coils which will be on at any given time during operation. Current is reversed in the coils to rotate the motor. This is called "bipolar", and is the most common choice. A 6-lead motor is considered "unipolar," with 4 coils with the commons connected together in each phase. Bipolar motors typically produce about 30% more torque than their unipolar counterparts.
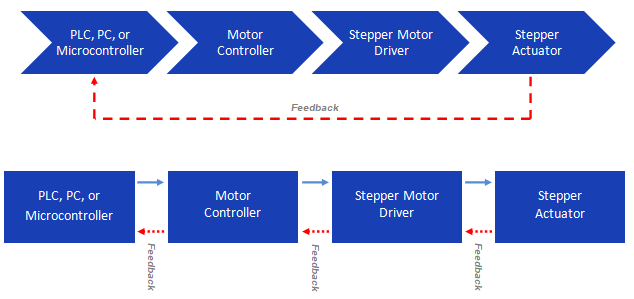
Helpful Information
- PLC, PC, or microcontroller
- Motor controller
- Stepper motor driver
- Stepper motor linear actuator
Manual linear actuators use a crank or control knob in addition to a lead screw. The knob of can also be indexed to indicate the angular position of the load. The displacement of is related to the angular displacement of the knob by the lead screw pitch.
Precision linear actuators do not use a lead screw. Linear actuators of that caliber use a fine-pitch screw which presses on a hard metal pad on the platform of the storage. Rotating the screw will move the platform in a linear motion. A spring is used to keep force between the platform and the actuator. This provides more precise motion.
Linear Actuators mounted vertically are somewhat different. The actuator is connected to the moveable platform and its tip rests on a metal pad on the fixed base. The weight of the platform and its load is supported by the actuator.
In some linear actuators, a stepper motor may be used in place of a manual knob. A stepper motor can move in fixed increments dependant on the step resolution of the system. The stepper actuator, in this case, moves similarly to an indexed knob. In other actuators, a DC motor may be used in place of a manual knob control or step motor. A DC motor, however, does not move in fixed increments like a stepper motor.
If an alternate means of position verification is required, an encoder may be integrated into the system to provide feedback. The encoder allows a motion controller to reliably move the stage to set positions on the linear actuator.